Понятие об энергетическом стандарте обеспеченности средства платежа позволяет увидеть ещё один аспект уравнений межотраслевого баланса. Дело в том, что подавляющее большинство демографически обусловленных потребностей — это энергоемкие потребности в пище, одежде, жилище, транспорте, обогреве. Полезные затраты энергии в технологиях на выпечку хлеба, выплавку стали, скручивание нити, добычу и транспортировку сырья и стройматериалов и т.п. обусловлены в каждой технологии неизменно естественно-природными факторами.
С другой стороны, демографически обусловленные потребности ограничены. Человек может умереть от обжорства, как от одноразового, так и от систематического. Семья без прислуги не может поддерживать в порядке дворец и парк при нём, но там, где появляется «прислуга за всё», и, казалось бы, повышается эффективность профессиональной деятельности взрослых членов семьи на работе, там начинается развращение подрастающего поколения, в котором взращивается желание всю жизнь жить дармовщиной, трудом «прислуги за всё»: это — цепная реакция генерации паразитизма в новых поколениях.
Поэтому, если стандарты демографической обусловленности по пище ограничены физиологией человека, ведущего здоровый образ жизни, то по вещам они также ограничены размерами и обустройством дома, усадьбы и транспорта, которые семья, что в настоящем контексте означает несколько совместно живущих без тесноты[1] поколений родственников, может содержать в порядке своими силами при эпизодической помощи «службы быта» (сферы услуг), так или иначе, всегда существующей в обществе.
Сказанное означает, что долгосрочное планирование переходного процесса ликвидации недостачи продукции по демографически обусловленному спектру потребностей может вестись в форме, учитывающей рост энергопотенциала и разпределение энергопотребления по отраслям.
Можно ввести соотношения типа:
FP = [PБ ii]FК ; XP = [PБ ii]XК ;
FК = [PБ ii-1]FP ; XК = [PБ ii-1]XP ,
здесь и далее, где это имеет значение, индекс «P» (от латинского «прейскурант») при векторах и матрицах указывает на стоимостную форму учёта; индекс «К» (от обрусевшего латинского «каталог») при векторах указывает на натуральную форму учёта (матрице A по умолчанию соответствует натуральная форма учёта); [PБ ii] , [PБ ii-1] — диагональные матрицы: [PБ ii] ,составленная из элементов прейскуранта вектора P; элементы матрицы [PБ ii-1] образованы по правилу:
PБ-111 = 1/PБ 1 , PБ-122 = 1/PБ 2 , … , PБ-1nn = 1/PБ n .
На основе этих соотношений уравнения типа (6) могут быть представлены в виде:
[РБ ii](E – A) [РБ ii-1] XP = [PБ ii]FК либо после преобразования:
(E – AP) XP = FP ( 19 ) ,
где элементы матрицы AP =[aP ij] определяются соотношением:
aP ij =(РБ i / РБ j)aij .
Уравнение (19) представляет баланс продуктообмена в стоимостной форме учёта и описывает соотношение: «финансовые затраты на производство, за изключением явного выражения затрат, входящих в rЗСТ , — выход конечной продукции в стоимостной форме учёта»[2]. Оно имеет смысл при определённых прейскуранте РБ и матрице A. Если же оно в дополнение к этому связано с энергетическим стандартом обеспеченности средств платежа, то оно является одной из форм, описывающих разпределение энергопотребления по отраслям в процессе производства обществом спектров продукции ХК и FК на производственном цикле избранной длительности DT.
Но в такой интерпретации уравнение (19) — не математическое выражение “трудовой” или “техноэнергетической” теории стоимости, т.е. теории ценообразования: оно — только расчётная схема; действующий в обществе механизм ценообразования ею не описывается, а сам прейскурант РБ и энергетический стандарт обеспеченности средств платежа только придают ей определённость при переходе к натуральной форме учёта.
И эта определённость может быть положена в основу систематического долгосрочного планирования развития народного хозяйства, ликвидирующего нехватку потребления по демографически обусловленному спектру. Эта определённость при ориентации общественной системы производства на устойчиво прогнозируемый демографически обусловленный спектр потребностей позволяет преодолеть в системе планирования долгосрочную непредсказуемость технико-технологического прогресса.
В составе спектра FК конечной продукции есть группа «инвестиционных продуктов». Объёмы их производства для каждой из отраслей их потребителей в балансе продуктообмена отраслей предопределяют векторы валового выпуска ХК и конечной продукции FК последующего межотраслевого баланса, в состав вектора FК которого также входит своя группа “инвестиционных” продуктов.
Это означает, что, если прогноз изменения демографически обусловленных потребностей описан как вектор FD на длительную перспективу; если известны статистические характеристики возобновления ранее удовлетворенных потребностей по каталогу спектра FD , обусловленные 1) физиологией человека, 2) эргономичностью и 3) ресурсными характеристиками вещей, находящихся в пользовании людей, семей и общества в целом, то возможна постановка задачи о построении хронологически преемственной последовательности межотраслевых балансов, описываемых уравнениями типа (19), в результате выполнения которой за минимальное количество производственных циклов народное хозяйство выходит в режим устойчивого безусловного удовлетворения демографически обусловленных потребностей в преемственности поколений.
Математически эта задача эквивалентна задачам поражения в n-мерном пространстве медленно маневрирующей цели самонаводящимся или управляемым снарядом и выхода на цель и осуществления её ближнего сопровождения. Решение такого рода задач для плоскости и трехмерного пространства многократно заказывал ВПК в целях противовоздушной, противоракетной, противолодочной обороны. Кроме того: из решения такого рода математических задач на основе известных возможных параметров движения и маневрирования целей определялись необходимые скоростные и манёвренные параметры средств её поражения при их разработке.
Судьба пилотируемого Пауэрсом американского разведчика “У-2”, южно-корейского “Боинга-747”[3], сбитых СССР, и иранского аэробуса “А‑310”[4], говорит о том, что в военных интерпретациях такого рода алгоритмы вполне работоспособны. Это говорит о том, что математический аппарат и работоспособные алгоритмы, в принципе позволяющие решить поставленную задачу, где-то лежат в уже готовом виде и нуждаются в модификации их для пространства размерности « n » контрольных параметров многоотраслевой производственно-потребительской системы, а также в метрологически состоятельной макро- и микроэкономической интерпретации входящих в такого назначения алгоритмы параметров и переменных.
При адаптации алгоритмов к решению задач оптимизации самоуправления во многоотраслевых производственно-потребительских системах, необходимо учесть, что общество порождает одно обстоятельство, которое не довлеет, по крайней мере, над большинством военных приложений математики к задачам поражения движущейся цели. Военным всё равно, поразит ракета самолёт при заходе на цель с её носовой, хвостовой, нижней или верхней полусферы. Но обществу не всё равно, выйдет ли народное хозяйство сначала на демографически обусловленный уровень производства хлеба и жилья, либо же сначала в изобилии будут производиться зубочистки, правящая “элита” будет раз в год менять лимузины, но хлеба вдоволь хватит только каждому десятому, а семьи будут разрушаться из-за того, что негде жить, поскольку эти виды производства будут отложены на “потом”.
Формально математически это означает, что если в n-мерном пространстве есть две точки, а объект необходимо перевести из одной из них в другую, то даже, если существует некоторое множество равновозможных траекторий и время перевода объекта по любой из них — одно и то же, то эти траектории всё же управленчески не эквивалентны. Трехмерный случай, иллюстрирующий эту неэквивалентность, показан на рис. 5.
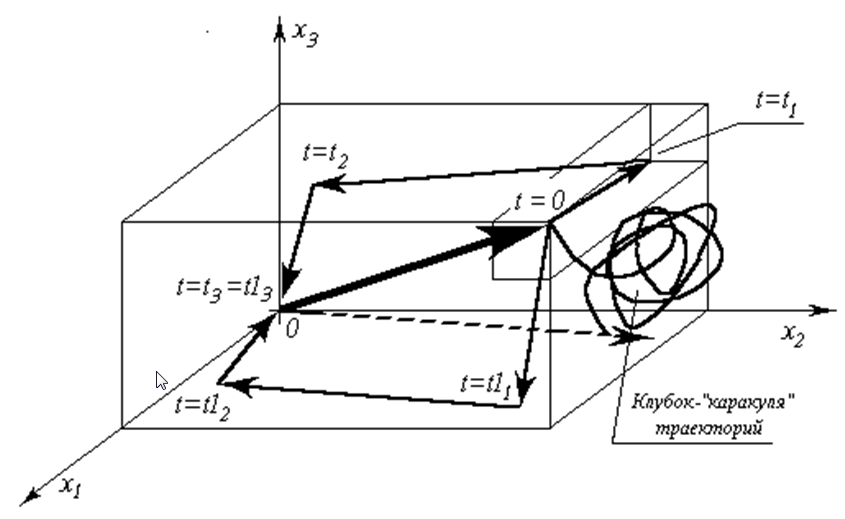
| Рис. 5. Зависимость оптимальной траектории объекта от упорядоченности одного и того же набора контрольных параметров в векторе целей управления |
На рис. 5 «0 x1 x2 x3» — пространство параметров, каждый из которых является мерой одной из трех частных ошибок управления в составе трехмерного вектора ошибки управления. Иными словами, идеальному режиму управления соответствует начало координат. Радиус-вектор, идущий сплошной линией из начала координат, — вектор ошибки управления в момент времени t = 0 . Траектории, определяемые последовательностью положений, изменяющихся с течением времени: « t = 0 , t = t1 , t = t2 , t = t3 » и « t = 0 , t = t11 , t = t12 , t = t13 = t3 » — ведут из одной и той же точки в пространстве параметров в одно и то же начало координат и переход по любой из них длится одинаковое время t3 . Выбор переходного режима (траектории) субъективно произволен, но первая траектория — оптимальна при упорядоченности вектора целей управления ( x1 , x2 , x3 ), вторая — оптимальна при упорядоченности ( x3 , x2 , x1). В реальном процессе упорядоченность параметров в векторе целей, воистину принятая в управление, выражается в порядке изчезновения частных ошибок управления (обнуления компонент вектора ошибки), вне зависимости от деклараций о благих намерениях управленцев. Именно в соответствии с этим принципом единства теории и практики управления ранее было высказано утверждение о первоприоритетности в векторе целей библейской цивилизации спектра деградационно-паразитических потребностей, подавляющего в управлении демографически обусловленные потребности.
Предположим, что на рис. 5: x1 — мера недостачи в обществе возможностей в получении образования подрастающим поколением; x2 — мера недостачи в питании, одежде, жилье, инфраструктурах; x3 — мера дефицита в роскоши и продукции деградационно-паразитического спектра потребностей. В силу действия неформализуемых взаимно изключающих обусловленностей параметров x1 и x3 при упорядоченности ( x3 , x2 , x1), система вряд ли пройдет по соответствующей такой упорядоченности траектории далее половины пути. Скорее всего, вследствие действия не формализованных в модели факторов, она уклонится в иной ошибочный режим, показанный пунктирным радиус-вектором, идущим из начала координат, который возможно не будет устойчивым балансировочным режимом. Именно на этот путь ступили “демократизаторы” и хотят вести по нему народы региональной цивилизации России.
Тому, кто себе в лоб забил алкогольно-никотиновый кол, лично непотребно образование, новое знание, поскольку оно — в тягость наркотически угнетенному. А его потомство, вследствие вероятностно предопределённых генетических нарушений, как в биомассе организма, так и в искалеченной и подавленной в процессе воспитания психике, возможно не сможет освоить и те знания и культурные навыки, что были естественным достоянием предков. Это приведёт к падению культуры производства и уронит спектры производства и потребления.
“Саморегуляция” рынка без разделения демографически обусловленного и деградационных спектров будет выглядеть на рис. 5 по этим информационным причинно-следственным обусловленностям как хаотичное мельтешение ненулевого радиус-вектора в пространстве параметров, относительно какого-то среднестатистического положения, управляемого извне внесистемными факторами. “Саморегуляция” такого рода показана на рис. 5 как клубковидная “каракуля”.
Сказанное означает, что ограниченность трудовых ресурсов, квалификации, производственных мощностей в отраслях, энергопотенциала общества, после оценки нехватки в удовлетворении потребностей общества предопределяет как разделение демографически обусловленного и деградационно-паразитического спектров, так и формирование номенклатуры (каталога) демографически обусловленного спектра и упорядоченности её по приоритетности значимости ликвидации недостачи.
В процессе реального управления, в том числе и на стадии планирования, для разных этапов переходного процесса (рис. 5) понятию демографической обусловленности может соответствовать несколько разная номенклатура и её упорядоченность, определяющая демографически обусловленный вектор целей (контрольный спектр параметров). Эти различия должны находить своё отражение как в критерии оптимальности многошагового переходного процесса в целом, так и в критериях оптимальности каждого из шагов в планируемом переходном процессе.
Оптимизация каждого из множества производственных циклов DT вне объёмлющей задачи оптимизации по минимуму времени переходного процесса исчерпания недостаточности демографически обусловленного спектра потребления — изначально методологически несостоятельная задача, поскольку это — “оптимальный” шаг неизвестно куда. Но и оптимизация переходного макроэкономического процесса — лишь частная задача в процессе перехода к жизни общества в ладу с объёмлющей его биосферой.
Теперь разсмотрим метод динамического программирования, поскольку, хотя и было показано, что алгоритмы решения задачи об оптимальном наведении средств поражения на цель в нынешней цивилизации не могут не существовать, тем не менее, необходимо содержательно обсудить ещё некоторые “само собой” разумеющиеся очевидности, касающиеся оптимального выбора траекторий многопараметрических переходных процессов.
По отношению к макроэкономической системе её “скоростные” параметры, прежде всего, определяются энергопотенциалом. Поэтому в макроэкономических интерпретациях задача «наведения оружия на цель» предстает как задача о темпах роста энергопотенциала и его разпределении: 1) на производство демографически обусловленного спектра потребностей и 2) на развитие и поддержание производственной базы всех отраслей.
Математически такое решение может быть получено, в частности, на основе алгоритмов, реализующих метод динамического программирования (он может изпользоваться и для решения задач линейного программирования). Обстоятельное его изложение и конкретные алгоритмические модели решения тех или иных прикладных задач можно найти в специальной литературе. Здесь же мы опишем его структуру и затронем некоторые с ним связанные мировоззренческие вопросы.
Алгоритм метода динамического программирования осуществляет формализованный выбор оптимальной в некотором смысле траектории в n-мерном пространстве. Термин «динамическое программирование», также как и термин «линейное программирование», о котором речь шла ранее, — прижившиеся в Русском языке подстрочники, мало что говорящие о существе самих методов выбора математически формализованных наилучших вариантов решения практических задач управления, планирования, проектирования.
Аппарат динамического программирования позволяет решать задачи многопараметрической оптимизации в тех случаях, когда в силу разного рода объективно-математических причин (дискретность ограничений, нелинейности математической модели, нарушение свойства выпуклости и т.п.) стандартные алгоритмы решения задач линейного программирования неработоспособны.
Вполне понятно, что метод динамического программирования, как и прочие математические методы оптимизации, не изучался и не изучается в большинстве вузовских курсов СССР и России на специальностях, в которых владение им придаёт квалификации специалистов КАЧЕСТВЕННО более высокий уровень. Тем более в литературе не обсуждаются и философско-мировоззренческие аспекты нашедшие в нём своё алгоритмическое выражение.
В изложении существа метода динамического программирования мы опираемся на книгу “Курс теории автоматического управления” (Палю де Ла Барьер: французское издание 1966 г., русское издание — “Машиностроение”, 1973 г.), хотя и не повторяем его изложения. Отдельные положения взяты из ранее упоминавшегося курса “Изследование операций” Ю.П.Зайченко (Киев, “Вища школа”, 1979)[5].
* * *
Метод динамического программирования работоспособен, если формальная интерпретация реальной задачи позволяет выполнить следующие условия:
- Разсматриваемая задача может быть представлена как N‑шаговый процесс, описываемый соотношением:
Xn + 1 = f(Xn , Un , n), где n — номер одного из множества возможных состояний системы, в которое она переходит по завершении n-ного шага; Xn — вектор состояния системы, принадлежащий упомянутому n-ному множеству; Un — управление, выработанное на шаге n (шаговое управление), переводящее систему из возможного её состояния в n-ном множестве в одно из состояний (n + 1)‑го множества. Чтобы это представить наглядно, следует обратиться к рис. 6, 7, 8, о которых речь пойдет далее.
- Структура задачи не должна изменяться при изменении расчётного количества шагов N.
- Размерность пространства параметров, которыми описывается состояние системы, не должна изменяться в зависимости от количества шагов N.
- Выбор управления на любом из шагов не должен отрицать выбора управления на предыдущих шагах. Иными словами оптимальный выбор управления в любом из возможных состояний должен определяться параметрами разсматриваемого состояния, а не параметрами процесса, в ходе которого система пришла в разсматриваемое состояние.
Чисто формально, если одному состоянию соответствуют разные предистории его возникновения, влияющие на последующий выбор оптимального управления, то метод позволяет включить описания предисторий в вектор состояния, что ведёт к увеличению размерности вектора состояния системы. После этой операции, то, что до неё описывалось как одно состояние, становится множеством состояний, отличающихся одно от других компонентами вектора состояния, описывающими предисторию процесса.
- Критерий оптимального выбора последовательности шаговых управлений Un и соответствующей траектории в пространстве формальных параметров имеет вид:
V = V0 (X0 , U0) + V1 (X1 , U1) + …+ VN – 1 (XN- 1 , UN – 1) + VN (XN) .
Критерий V принято называть полным выигрышем, а входящие в него слагаемые — шаговыми выигрышами. В задаче требуется найти последовательность шаговых управлений Un и траекторию, которым соответствует максимальный из возможных полных выигрышей. По своему существу полный “выигрыш” V — мера качества управления процессом в целом. Шаговые выигрыши, хотя и входят в меру качества управления процессом в целом, но в общем случае не являются мерами качества управления на соответствующих им шагах, поскольку метод предназначен для оптимизации управления процессом в целом, а эффектные шаговые управления с большим шаговым выигрышем, но лежащее вне оптимальной траектории интереса не представляют. Структура метода не запрещает при необходимости на каждом шаге употреблять критерий определения шагового выигрыша Vn , отличный от критериев, принятых на других шагах.
С индексом n — указателем-определителем множеств возможных векторов состояния — в реальных задачах может быть связан некий изменяющийся параметр, например: время, пройденный путь, уровень мощности, мера расходования некоего ресурса и т.п. То есть метод применим не только для оптимизации управления процессами, длящимися во времени, но и к задачам оптимизации многовариантного одномоментного или нечувствительного ко времени решения, если такого рода “безвременные”, “непроцессные” задачи допускают их многошаговую интерпретацию.
Теперь обратимся к рис. 6 — рис. 8, повторяющим взаимно связанные рис. 40, 41, 42 из курса теории автоматического управления П. де Ла Барьера.
На рис. 6 показаны начальное состояние системы «0» и множества её возможных последующих состояний «1», «2», «3», а также возможные переходы из каждого возможного состояния в другие возможные состояния.
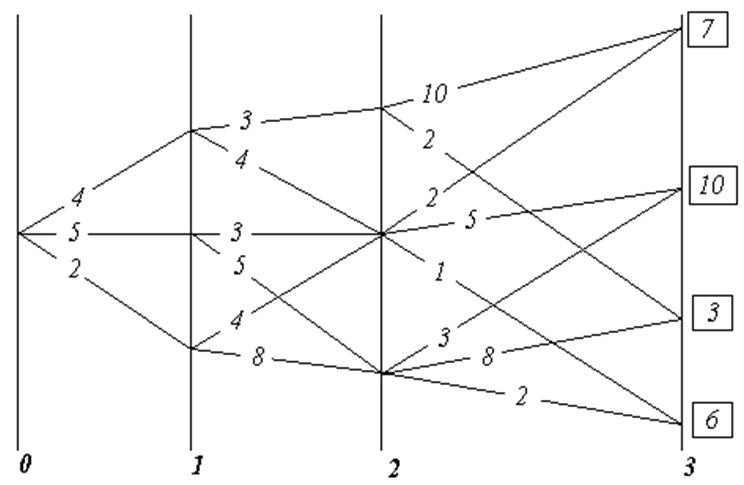
Рис. 6. К существу метода динамического программирования |
И всё это вместе похоже на карту настольной детской игры, по которой перемещаются фишки: каждому переходу-шагу соответствует свой шаговый выигрыш, а в завершающем процесс третьем множестве — каждому из состояний системы придана его оценка, помещенная в прямоугольнике. Принципиальное отличие от игры в том, что гадание о выборе пути, употребляемое в детской игре, на основе бросания костей или вращения волчка и т.п., в реальном управлении недопустимо, поскольку это — передача целесообразного управления тем силам, которые способны управлять выпадением костей, вращением волчка и т.п.
Если выбирать оптимальное управление на первом шаге, то необходимо предвидеть все его последствия на последующих шагах. Поэтому описание алгоритма метода динамического программирования часто начинают с описания выбора управления на последнем шаге, ведущем в одно из завершающих процесс состояний. При этом ссылаются на «педагогическую практику», которая свидетельствует, что аргументация при описании алгоритма от завершающего состояния к начальному состоянию легче возпринимается, поскольку опирается на как бы уже сложившиеся к началу разсматриваемого шага условия, в то время как возможные завершения процесса также определены.

| Рис. 7. К существу метода динамического программирования |
В соответствии с этим на рис. 7 анализируются возможные переходы в завершающее множество состояний «3» из каждого возможного состояния в ему предшествующем множестве состояний «2», будто бы весь предшествующий путь уже пройден и осталось последним выбором оптимального шагового управления завершить весь процесс. При этом для каждого из состояний в множестве «2» определяются все полные выигрыши как сумма = «оценка перехода» + «оценка завершающего состояния». Во множестве «2» из полученных для каждого из состояний, в нём возможных полных выигрышей, определяется и запоминается максимальный полный выигрыш и соответствующий ему переход (фрагмент траектории). Максимальный полный выигрыш для каждого из состояний во множестве «2» взят в прямоугольную рамку, а соответствующий ему переход отмечен стрелкой. Таких оптимальных переходов из одного состояния в другие, которым соответствует одно и то же значение полного выигрыша, в принципе может оказаться и несколько. В этом случае все они в методе неразличимы и эквивалентны один другому в смысле построенного критерия оптимальности выбора траектории в пространстве параметров, которыми описывается система.
После этого множество «2», предшествовавшее завершающему процесс множеству «3», можно разсматривать в качестве завершающего, поскольку известны оценки каждого из его возможных состояний (максимальные полные выигрыши) и дальнейшая оптимизация последовательности шаговых управлений и выбор оптимальной траектории могут быть проведены только на ещё не разсмотренных множествах, предшествующих множеству «2» в оптимизируемом процессе (т.е. на множествах «0» и «1»).
Таким образом, процедура, иллюстрируемая рис. 7, работоспособна на каждом алгоритмическом шаге метода при переходах из n-го в (n – 1)-е множество, начиная с завершающего N‑ного множества до начального состояния системы.
В результате последовательного попарного перебора множеств, при прохождении всего их набора, определяется оптимальная последовательность преемственных шаговых управлений, максимально возможный полный выигрыш и соответствующая им траектория. На рис. 8 утолщённой линией показана оптимальная траектория для разсматривавшегося примера.
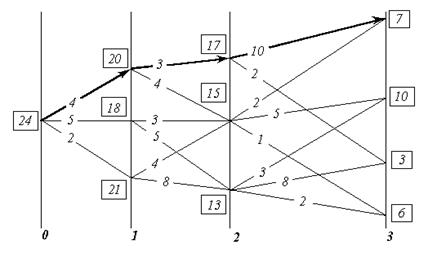
| Рис. 8. К существу метода динамического программирования. |
В разсмотренном примере критерий оптимальности — сумма шаговых выигрышей. Но критерий оптимальности может быть построен и как произведение обязательно неотрицательных сомножителей.
Поскольку результат (сумма или произведение) не изменяется при изменении порядка операций со слагаемыми или сомножителями, то алгоритм работоспособен и при переборе множеств возможных состояний в порядке, обратном разсмотренному: т.е. от исходного к завершающему множеству возможных состояний.
Если множества возможных состояний упорядочены в хронологической последовательности, то это означает, что расчётная схема может быть построена как из реального настоящего в прогнозируемое определённое будущее, так и из прогнозируемого определённого будущего в реальное настоящее. Это обстоятельство говорит о двух неформальных соотношениях реальной жизни, лежащих вне алгоритма:
1). Метод динамического программирования формально нечувствителен к характеру причинно-следственных обусловленностей (в частности, он не различает причин и следствий). По этой причине каждая конкретная интерпретация метода в прикладных задачах должна строиться с неформальным учётом реальных причинно следственных обусловленностей;
2). Если прогностика в согласии с иерархически высшим объёмлющим управлением, а частное вложенное в объёмлющее управление осуществляется квалифицировано, в силу чего процесс частного управления протекает в ладу с иерархически высшим объёмлющим управлением, то НЕ СУЩЕСТВУЕТ УПРАВЛЕНЧЕСКИ ЗНАЧИМОЙ РАЗНИЦЫ МЕЖДУ РЕАЛЬНЫМ НАСТОЯЩИМ И ИЗБРАННЫМ БУДУЩИМ. Процесс целостен, по какой причине ещё не свершившееся, но уже нравственно избранное и объективно не запрещенное Свыше будущее, в свершившемся настоящем защищает тех, кто его творит на всех уровнях: начиная от защиты психики от наваждений до защиты от целенаправленной “физической” агрессии. То есть, если матрица возможных состояний (она же матрица возможных переходов) избрана в ладу с иерархически высшим объёмлющим управлением, то она сама — защита и оружие, средство управления, на которое замкнуты все шесть приоритетов средств обобщенного оружия и управления.
Объективное существование матриц возможных состояний и переходов проявляется в том, что в слепоте можно “забрести” в некие матрицы перехода и прочувствовать на себе их объективные свойства. Последнее оценивается субъективно, в зависимости от отношения к этим свойствам, как полоса редкостного везения либо как нудное “возвращение на круги своя” или полоса жестокого невезения.
Но для пользования методом динамического программирования и сопутствующими его освоению неформализованными в алгоритме жизненными проявлениями матриц перехода, необходимо СОБЛЮДЕНИЕ ГЛАВНОГО из условий:
В задачах оптимизации процессов управления метод динамического программирования <реального будущего: — по умолчанию> работоспособен только, если определён вектор целей управления, т.е. должно быть избрано завершающее процесс конкретное состояние.
В реальности это завершающее конкретное состояние должно быть заведомо устойчивым и приемлемым процессом, объёмлющим и несущим оптимизируемый методом частный процесс. Но выбор и определение конкретных характеристик процесса, в который должна войти управляемая система по завершении алгоритма метода — лежит вне его самого в области “мистики” или в области методов, развитых в не математических по своему существу науках.
«Каково бы ни было состояние системы перед очередным шагом, надо выбирать управление на этом шаге так, чтобы выигрыш на данном шаге плюс оптимальный выигрыш на всех последующих шагах был максимальным» (Е.С.Вентцель, “Изследование операций. Задачи, принципы, методология.”, М., “Наука”, 1988 г., стр. 109).
Неспособность определить вектор целей управления (достижением которого должен завершиться оптимизируемый в методе процесс) и/либо выявить исходное состояние объекта управления не позволяет последовать этой рекомендации, что объективно закрывает возможности к изпользованию метода динамического программирования, поскольку начало и конец процесса должны быть определены в пространстве параметров, на которых построена математическая (или иная) модель метода. Причем определённость завершения оптимизируемого процесса имеет управленчески большее значение, чем ошибки и некоторые неопределённости в идентификации (выявлении) начального состояния объекта управления.
Это тем более справедливо для последовательных многовариантных шаговых переходов, если матрица возможных состояний вписывается в пословицу «Все дороги ведут в “Рим”», а которые не ведут в “Рим”, — ведут в небытие. Для такого рода процессов, если избрана устойчивая во времени цель и к ней ведут множество траекторий, то при устойчивом пошаговом управлении “разстояние” между оптимальными траекториями, идущими к одной и той же цели из различных исходных состояний, от шага к шагу сокращается, вплоть до полного совпадения оптимальных траекторий, начиная с некоторого шага. Это утверждение тем более справедливо, чем более определённо положение завершающего процесс вектора целей в пространстве параметров. По аналогии с математикой это можно назвать асимптотическим множеством траекторий: асимптотичность множества траекторий выражается в том, что «все дороги ведут в “Рим”…»
И в более общем случае, рекомендации Нового Завета и Корана утверждают возможность обретения благодати, милости Вседержителя вне зависимости от начального состояния (греховности человека) в тот момент, когда он очнулся и увидел свои дела такими, каковы они есть.
Другое замечание относится уже к практике: ко вхождению в матрицу перехода. Если начальное состояние системы определено с погрешностью, большей чем допустимая для вхождения в матрицу перехода из реального начального состояния в избранное конечное, то управление на основе самого по себе безошибочного алгоритма метода динамического программирования приведёт к совсем иным результатам, а не расчётному оптимальному режиму системы. Грубо говоря, не следует принимать за выход из помещения на высоком этаже открытое в нём окно.
То есть метод динамического программирования необходимостью как определённости в выборе конечного состояния-процесса, так и необходимостью выявления истинного начального состояния, сам собой защищён от применения его для наукообразной имитации оптимизации управления при отсутствии такового. Это отличает метод динамического программирования, в частности от аппарата линейного программирования, в который можно сгрузить экспромтные оценки “экспертами” весовых коэффициентов в критериях оптимизации Min (Z) либо Max (Z).
Эта сама собой защищенность от недобросовестного изпользования косвенно отражена и в литературе современной экономической науки: поскольку она не определилась с тем, что является вектором целей управления по отношению к производственно-потребительской системе государства, то не встречаются и публикации об изпользовании аппарата линейного программирования для оптимизации управления макроэкономическими системами регионов и государств в целом на исторически длительных интервалах времени.
Примерами тому “Математическая экономика на персональном компьютере” под ред. М.Кубонива, в которой глава об управлении в экономике содержит изключительно макроэкономические интерпретации аппарата линейного программирования (прямо так и названа “Управление в экономике. Линейное программирование и его применение”), но ничего не говорит о векторе целей управления и средствах управления; в ранее цитированном учебнике Ю.П.Зайченко описание метода динамического программирования, так же построено на задачах иного характера.
Однако при мотивации отказа от макроэкономических интерпретаций метода динамического программирования авторы обычно ссылаются на так называемое в вычислительной математике «проклятие размерности», которое выражается в том, что рост размерности задачи N вызывает рост объёма вычислений, пропорциональный N k, где показатель степени « k » больше 1. Такой нелинейный рост объёма вычислений действительно делает многие работоспособные вычислительные алгоритмы никчемными в решении практических задач как из-за больших затрат машинного времени компьютеров, так и из-за накопления ошибок в приближенных вычислениях. Но это «проклятие размерности» относится не только к методу динамического программирования, но и к другим методам, которые, однако, встречаются и в их макроэкономических интерпретациях.
ВАЖНО ОБРАТИТЬ ВНИМАНИЕ И ПОНЯТЬ: Если в математике видеть науку об объективной общевселенской мѢре (через “ять”), а в её понятийном, терминологическом аппарате и символике видеть одно из предоставленных людям средств описания объективных частных процессов, выделяемых ими из некоторых объёмлющих процессов, то всякое описание метода динамического программирования есть краткое изложение всей ранее изложенной достаточно общей теории управления, включая и её мистико-религиозные аспекты; но — на языке математики.
Чтобы пояснить это, обратимся к рис. 9, памятуя о сделанном ранее замечании об определённости начального состояния с достаточной для вхождения в матрицы перехода точностью.

Рис. 9. Динамическое программирование, Различение и достаточно общая теория управления |
На нём показаны два объекта управления «А» и «Б» в начальном состоянии; три объективно возможных завершающих состояния (множество «5»); множества («1» — «4») возможных промежуточных состояний; и пути объективно возможных переходов из каждого состояния в иные.
Рис. 9 можно уподобить некоторому фрагменту общевселенской меры развития (многовариантного предопределения) — одной из составляющих в триединстве «материя-информация-мера».
Если принять такое уподобление рис. 9, то объективно возможен переход из любого начального состояния «0:1» или «0:2» в любое из завершающих состояний «5:1», «5:2», «5:3». Но эта объективная возможность может быть ограничена субъективными качествами управленцев, намеревающихся перевести объекты «А» и «Б» из начального состояния в одно из завершающих состояний.
Если дано Свыше Различение[6], то управленец «А» (или «Б») снимет с объективной меры “кальку”, на которой будет виден хотя бы один из множества возможных путей перевода объекта из начального состояния во множество завершающих. Если Различение не дано, утрачено или отвергнуто в погоне за вожделениями, или бездумной верой в какую-либо традицию, но не Богу по совести, то на “кальке” будут отсутствовать какие-то пути и состояния, но могут “появиться” объективно невозможные пути и состояния, объективно не существующие в истинной Богом данной мере. Кроме того, по субъективному произволу управленца выбирается и желанное определённое завершающее состояние из их множества. Соответственно следование отсебятине или ошибка в выборе предпочтительного завершающего состояния может завершиться катастрофой с необратимыми последствиями.
Но матрица возможных состояний, показанная на рис. 9, вероятностно предопределяет только частный процесс в некой взаимной вложенности процессов. По этой причине каждое из начальных состояний «0:1», «0:2» может принадлежать либо одному и тому же, либо различным объёмлющим процессам, в управленческом смысле иерархически высшим по отношению к разсматриваемому; то же касается и каждого из завершающих состояний «5:1», «5:2», «5:3» в паре «исходное — завершающее» состояния. Каждый из объёмлющих процессов обладает их собственными характеристиками и направленностью течения событий в нём.
Может оказаться, что цель «5:1» очень привлекательна, если смотреть на неё из множества начальных неудовлетворительных состояний. Но не изключено, что объёмлющий процесс, к которому завершающее состояние «5:1» принадлежит, как промежуточное состояние, в силу взаимной вложенности процессов, на одном из последующих шагов завершается полной и необратимой катастрофой. Например, цель «5:1» — не опоздать на “Титаник”, выходящий в свой первый рейс, ставший трагическим и последним… Чтобы не выбирать такую цель из множества объективно возможных, необходимо быть в ладу с иерархически наивысшим объёмлющим управлением, которое удержит частное ладное с ним управление от выбора такой цели, принадлежащей к обреченному на изчезновение процессу.
Но если рис. 9 — “калька” с объективной меры, то может статься, что какое-то завершающее состояние, являющееся вектором целей — отсебятина, выражающая желание “сесть на два поезда сразу”. Иными словами разные компоненты вектора целей принадлежат к двум или более взаимно изключающим друг друга иерархически высшим объёмлющим процессам протекающим одновременно.
Это один из случаев неопределённости и дефективности вектора целей, делающий метод динамического программирования неработоспособным, а реальный процесс “управления” неустойчивым, поскольку одна и та же “лодка” не может пристать и к правому, и к левому берегу одновременно, даже если привлекательные красоты на обоих берегах реки, при взгляде издали из-за поворота реки совмещаются, создавая видимость подходящего для пикника весьма уютного места. Чтобы не выбрать такого вектора целей, также необходимо, чтобы Свыше было дано Различение правого и левого “берегов”.
То есть алгоритму динамического программирования, даже если его можно запустить, сопутствует ещё одно внешнее обстоятельство, которое тоже очевидно, “само собой” разумеется, но в большинстве случаев игнорируется: завершающее частный оптимизируемый процесс состояние должно принадлежать объёмлющему процессу, обладающему заведомо приемлемыми собственными характеристиками течения событий в нём.
После избрания цели, принадлежащей во взаимной вложенности к объёмлющему процессу с приемлемыми характеристиками устойчивости и направленностью течения событий в нём, необходимо увидеть пути перехода и выбрать оптимальную последовательность преемственных шагов, ведущую в избранное завершающее частный процесс состояние; т.е. необходимо избрать концепцию управления.
Концепция управления в объективной мере, обладает собственными характеристиками, которые совместно с субъективными характеристиками субъекта-управленца, порождают вероятностную предопределённость осуществления им концепции управления. Значение вероятностной предопределённости успешного завершения процесса — объективная иерархически высшая мера, оценка замкнутой системы «объект + управленец + концепция», в отличие от вероятности — объективной меры системы «объект + объективно существующая концепция управления».
Поэтому, чем ниже вероятность перевода объекта в желательное завершающее состояние, тем выше должна быть квалификация управленца, повышающая значение вероятностной предопределённости успешного завершения процесса управления.
Соответственно сказанному, для администратора признание им некой концепции управления может выражаться в его уходе с должности по собственной инициативе, проистекающей из осознания им своей неспособности к осуществлению признанной им концепции управления; а неприятие концепции может выражаться, как заявление о её принятии и последующие искренние ревностные, но неквалифицированные усилия по её осуществлению. Они приведут к тому, что концепция будет дискредитирована, поскольку квалифицированные управленцы, способные к её осуществлению, не будут допущены до управления по личной ревности, жажде славы, зарплаты или ещё чего-то со стороны благонамеренного самонадеянного неквалифицированного недочеловека.
Вследствие нетождественности вероятности и вероятностной предопределённости очень хорошая концепция может быть загублена плохими исполнителями её: на двухколесном велосипеде ездить лучше, чем на трехколёсном, но не все умеют; но некоторые ещё будут доказывать, что на двухколесном и ездить нельзя, поскольку он падает и сам по себе, а не то что с сидящим на нём человеком, тем более на ходу, — если они ранее не видели, как ездят на двухколесном; а третьи, не умея и не желая учиться ездить самим, из ревности не отдадут велосипед тем, кто умеет.
Поэтому после принятия концепции к исполнению необходимо придерживаться концептуальной дисциплины и взращивать концептуальную дисциплину. То есть необходимо поддерживать достаточно высокое качество управления на каждом шаге всеми средствами, чтобы не оказаться к началу следующего шага в положении, из которого в соответствии с избранной концепцией управления перевод объекта в избранное завершающее состояние невозможен. Этот случай — уклонение с избранного пути «2:2» → «3:3» показан: дуга «2:2» → «3:1» — необратимый срыв управления, после которого невозможен переход в состояние «5:3»; дуга «2:2» → «3:2» — обратимый срыв управления, в том смысле что из требуется корректирование концепции, исходя из состояния «3:2», разсматриваемого в качестве начального.
Если на рис. 9 объективной иерархически высшей мере качества состояний, в которых могут находиться объекты субъектов-управленцев «А» и «Б», соответствует шкала качества возможных состояний «I», то для их блага целесообразен переход из множества состояний «0» в состояние «5:3». Но выбор ими направленности шкалы оценки качества состояний нравственно обусловлен и субъективен: либо как показано на рис. 9 «I», либо в противоположном «I» направлении.
Если на рис. 9 возможные состояния сгруппированы во множества «1», «2», «3», «4», «5» по признаку синхронности, то в координатных осях 0ty , при шкале качества состояний «I» разстояние от оси 0t до любой из траекторий — текущая ошибка управления при движении по этой траектории. Площадь между осью 0t и траекторией — интеграл по времени от текущей ошибки. Он может быть изпользован как критерий-минимум оптимальности процесса управления в целом, т.е. в качестве полного выигрыша, являющегося в методе динамического программирования мерой качества, но не возможных состояний, не шагов-переходов из одного состояния в другое, а всей траектории перехода. Но в общем случае метода шаговые выигрыши могут быть построены и иначе.
Если принят критерий оптимальности типа минимум[7] значения интеграла по времени от текущей ошибки управления (на рис. 9 это — площадь между осью 0t и траекторией перехода), то для субъекта «А» оптимальная траектория — «0:2» → «1:3» → «2:2» → «3:3» → «4:4» → «5:3»; а для субъекта «Б» оптимальная траектория — «0:1» → «1:2» → «2:2» → «3:3» → «4:4» → «5:3».
Срывы управления «1:2» → «2:1» → «3:1»; «2:2» → «3:1»; «2:2» → «3:2» → «4:1»; «3:2» → «4:2» — полная необратимая катастрофа управления по концепции, объективно возможной, но не осуществленной по причине низкого качества текущего управления в процессе перевода объекта в избранное конечное состояние «5:3». Все остальные срывы управления обратимы в том смысле, что требуют коррекции концепции и управления по мере их выявления.
То есть метод динамического программирования в схеме управления «предиктор-корректор» работоспособен, а сама схема развертывается, как его практическая реализация.
Возможны интерпретации метода, когда в вектор контрольных параметров (он является подмножеством вектора состояния) не входят какие-то характеристики объекта, которые, тем не менее, включены в критерий выбора оптимальной траектории. Например, если в состоянии «0:2» различные субъекты не различимы по их исходным энергоресурсам, а критерий выбора оптимальной траектории чувствителен к энергозатратам на переходах, то такому критерию может соответствовать в качестве оптимальной траектория «0:2» → «1:2» → «2:1» → «3:2» → «4:3» → «5:3» или какая-то иная, но не траектория «0:2» → «1:3» → «2:2» → «3:3» → «4:4» → «5:3», на которой достигается минимум интеграла от текущей ошибки управления.
Это означает, что управленец, в разпоряжении которого достаточный энергопотенциал, может избрать траекторию «0:2» → «1:3» → «2:2» → «3:3» → «4:4» → «5:3»; но если управленец с недостаточным для такого перехода энергопотенциалом не видит траектории «0:2» → «1:2» → «2:1» → «3:2» → «4:3» → «5:3», для прохождения которой его энергопотенциал достаточен, то состояние «0:2» для него субъективно тупиковое, безвыходное, хотя объективно таковым не является. Это говорит о первенстве Различения, даваемого Свыше непосредственно каждому, перед всем прочими способностями, навыками и знаниями.
Кроме того, этот пример показывает, что на одной и той же “кальке” с матрицы возможных состояний, соотносимой с полнотой реальности, можно построить набор критериев оптимальности, каждый из частных критериев, в котором употребляется в зависимости от конкретных обстоятельств осуществления управления. И каждой компоненте этого набора соответствует и своя оптимальная траектория. Компоненты этого набора критериев, так же как и компоненты в векторе целей, могут быть упорядочены по предпочтительности вариантов оптимальных траекторий. Но в отличие от вектора целей, когда при идеальном управлении реализуются все без изключения входящие в него цели, не смотря на иерархическую упорядоченность критериев оптимальности, один объект может переходить из состояния в состояние только по единственной траектории из всего множества оптимальных, в смысле каждого из критериев в наборе, траекторий. Критерии оптимальности выбора, входящие в иерархически организованный набор критериев, не обязательно могут быть удовлетворены все одновременно. Для управления необходимо, чтобы процесс отвечал хотя бы одному из множества допустимых критериев.
Может сложиться так, что один субъект реализует концепцию «0:2» → «1:2» → «2:1» → «3:2» → «4:3» → «5:3», а другой «0:2» → «1:3» → «2:2» → «3:3» → «4:4» → «5:3». Хотя конечные цели совпадают, но, тем не менее, если управленцы принадлежат к множеству управленцев одного и того же уровня в иерархии взаимной вложенности процессов, то это — конкуренция, “спортивная” гонка или концептуальная война; если они принадлежат к разным иерархическим уровням в одной и той же системе, то это — антагонизм между её иерархическими уровнями, ведущий как минимум к падению качества управления в смысле, принятом на её иерархически наивысшем уровне, а как максимум — к разпаду системы. Арбитр — иерархически высшее по отношению к ним обоим объёмлющее управление. Тем более, если завершающие цели различны, то это — концептуальная война, обостряющаяся по ходу процесса.
Из сказанного следует, что алгоритм динамического программирования и рис. 9, иллюстрирующий некоторые аспекты его приложений, являются довольно прозрачным намеком на весьма серьезные жизненные обстоятельства.
Чтобы метод динамического программирования можно было изпользовать для оптимизации переходного процесса, описанного в форме последовательности преемственных производственных циклов, необходимо в структуру уравнений межотраслевых балансов ввести в явном виде вектор управляющего воздействия. В противном случае основное рекуррентное соотношение метода Xn + 1 = f(Xn , Un , n) оказывается неопределённым, в силу чего метод утрачивает работоспособность.
* *
*
Поэтому, возвращаясь от рис. 9 к народному хозяйству, как целостной производственно-потребительской многоотраслевой системе, — одной из суперсистем в их взаимной вложенности в обществе, можно сделать вывод о недопустимости играть в бесцельную орлянку рыночной саморегуляции, показанную на рис. 5 как спутанный клубок траекторий всеобщей суеты.
Необходимо построение экологически допустимой демографически обусловленной системы производства и разпределения, подавляющей деградационно-паразитический спектр деятельности.
Демографически обусловленное плановое ведение народного хозяйства в условиях объективных биосферно-экологических ограничений — единственное средство удовлетворить потребности всех, чье поведение выражает их человеческое достоинство.
Тем, кто думает, что все люди разные, в силу чего вектор целей общественного производства на основе принципа демографической обусловленности сформировать невозможно, должно ответить только одно: все люди действительно разные и живут по-разному, но когда они в силу разных причин роняют данное им Свыше достоинство человека, или не поднимаются до него потому, что не смогли преодолеть “элитарно” обусловленного угнетения, они неотличимы в своём хуже, чем скотстве не только друг от друга, но и от клопов, глистов и т.п. Но в таком состоянии они — хуже, чем природные паразиты, поскольку клопу предопределен паразитизм его положением в биосфере и он ни к чему иному генетически не способен. А кому была Свыше возможность обрести человечное достоинство, но он поленился обрести его или постоянно роняет бездумно или по предумышленному своекорыстию, сладострастию и беззаботности, то такой человек нарушает иерархичность в организации Мироздания, возвышая иерархически паразитизм из флоры и фауны в общество разумных индивидов[8]. Это — разновидность богоборчества, сатанизм.
Поэтому, пребывая в ладу с Богом, можно выделить деградационно-паразитический спектр потребностей и статистически описать его в системе стандартизации и “маркетинга”. При этом от него в статистических описаниях отделятся и множественные различия в демографически обусловленных потребностях людей. Это так потому, что все люди — разные, но деградируют и паразитируют — до примитивности одинаково. И только после этого разделения спектров потребностей можно действовать осмысленно и целесообразно в сфере управления и саморегуляции производства и разпределения на уровне государственной или иной макроэкономической системы.
Теперь можно вернуться к ранее сказанному: переходный процесс в макроэкономической системе государства или глобальной цивилизации от состояния недостаточности производства по демографически обусловленному спектру потребностей до состояния достаточности может быть описан, как хронологически преемственная последовательность межотраслевых балансов энергопотребления в совокупности отраслей и домашнем быту.
По отношению к хронологической последовательности межотраслевых балансов в форме уравнений (19) необходимо понимать: получаемое решение основано на неизменности базовой, заложенной в расчёты культуры производства и технологиях. Научно-технический прогресс — плохо предсказуемое явление — ведёт к внедрению энергетически более мощных технологий и оптимизации продукции по материало- и энергоемкости производства. Это означает, что в последовательности энергетически обусловленных балансов типа (19) единицей измерения времени осуществления производственной программы является сам производственный цикл, а расчётная хронологическая длительность циклов является оценкой сверху (то есть по максимуму) предполагаемого срока осуществления производственной программы каждого из циклов и всей их совокупности.
При этом в силу научно-технического прогресса: 1) контрольные параметры, характеризующие каждый из циклов и всю их последовательность, в принципе достижимы за время, меньшее, чем расчётное; 2) неравномерность роста энерговооруженности отраслей, технологическое их обновление, техническое обновление производимой продукции неизбежно предопределяют необходимость управления, поддерживающего желательные значения компонент демографически обусловленного вектора FК в зависимости от технико-технологического обновления продукции и вне зависимости от реально сложившихся прейскуранта P и матрицы A, отличающейся от исходной матрицы, положенной в основу расчётной последовательности балансов типа (19).
То есть при условии управления макроэкономикой как целостностью и росте культуры потребления, изживающей бесцельное расточительство, в реальной жизни не может быть хуже, чем по расчётному плану-прогнозу на основе уравнений энергоразпределения в стоимостной форме межотраслевого баланса (19) с системой краткосрочного планирования предстоящего и нескольких за ним следующих производственных циклов на основе группы соотношений теории подобия макроэкономических систем (6 — 18) и решения задачи (4).
В (4) и в (6 — 18), а также в последовательности (19) нет ничего содержательно общего, кроме векторов FК и FP и стандарта вектора демографически обусловленной достаточности FD. Это означает, что исторически реально потребности первичны; производство, описываемое матрицей A, вторично. Кроме того, демографически обусловленные потребности исторически устойчивы и в силу этого предсказуемы при всякой демографической политике на несколько поколений вперёд: как по объёмам достаточного производства, так и по упорядоченности каталога (по значимости их), лежащего в основе их спектра. Это известно давно: Библия, Сирах, 29:24: «Главная потребность для жизни — вода и хлеб, и одежда и дом, прикрывающий наготу». Это можно разписать детальнее и шире, но упорядоченность потребностей сохранится:
- Улучшение возможностей получения образования и воспитание подрастающего поколения;
- Пища;
- Одежда;
- Жилище для семьи;
- Социальные услуги;
- Свободное времяпрепровождение для личностного развития — «хобби»;
- Роскошь — обычно дорогостоящая, но с печатью нравственного порока на себе.
Поэтому построение спектра вектора целей демографически обусловленного производства, т.е. определение упорядоченности потребностей в каталоге и стандартов минимума производства и избыточности его в соответствии с исторически устойчивой массовой статистикой здорового образа жизни сменяющих друг друга поколений — основа всей системы планирования, государственной экономической статистики и планового ведения народного хозяйства.
В этом случае долгосрочное планирование роста энергопотенциала общества и разпределения энергопотребления по демографически обусловленному спектру, во-первых, определённо, во-вторых, устойчиво. А краткосрочное планирование нескольких производственных предстоящих циклов также определённо, но на основе действующей системы стандартизации и сертификации продукции, услуг и технологий в краткосрочном планировании возможен переход от стоимостной формы учёта на основе энергетического стандарта обеспеченности средств платежа к натуральной форме учёта продукции в межотраслевых балансах; при этом структура вектора валовых мощностей XК и матриц А , DА определяется упорядоченностью по приоритетам значимости каталога стандарта вектора, спектра демографически обусловленной достаточности FD .
Реально система ведения народного хозяйства на основе планирования разрушается вовсе не вследствие непредсказуемости потребностей общества и технологий или непредсказуемости потребительских свойств перспективной продукции; не по причине нечувствительности аппарата линейной алгебры к дискретностям, нелинейностям и прочим затруднениям в описании реальности чисто математическими средствами. Она разрушается её собственной методологической и, прежде всего, метрологической несостоятельностью вследствие игнорирования и отрицания её создателями причинно-следственных обусловленностей в жизни биосферы, общества, семьи, человека как личности, математически неформализованных.
Наиболее часто разпространенное извращение причинно-следственных обусловленностей жизни при математической формализации в макроэкономических приложениях — навязать структуру разбивки народного хозяйства на отрасли, описываемые матрицей А, в качестве доминирующего системообразующего фактора, на котором строится всё планирование и прогнозирование. При таком подходе межотраслевые балансы в натуральном и стоимостном учёте продукции отличаются одни от другого не ролью каждого из них в системе управления, а по существу только масштабными множителями перехода от одной формы к другой. По этой причине балансовые уравнения в стоимостной форме, хотя и позволяют единообразно обобщить самую разнообразную продукцию в экономических показателях, тем не менее, не могут выполнить функцию инструмента долгосрочного прогноза и моделирования общественно-экономического развития.
Неравномерный технико-технологический прогресс в отраслях, структурная перестройка многоотраслевого народного хозяйства непрерывно изменяют матрицу А, делают её непредсказуемой тем более, чем о более отдаленном будущем идёт речь. Это разрушает всю систему планирования, построенную таким образом, и делает тем самым невозможным плановое ведение народного хозяйства на её основе, хотя вектор FD сохраняет неизменную структуру и достаточно предсказуем по группам продукции и необходимым энергозатратам на её производство.
Если же система планирования строится на основе предсказуемости вектора демографически обусловленных потребностей FD , то технико-технологический прогресс идёт в запас устойчивости планов; в реальной жизни при поддержании устойчивого метрологически и концептуально состоятельного управления не может быть хуже, чем предусмотрено планом. Непредсказуемость матрицы А присутствует всегда, но в одном случае она разваливает систему планирования, а в другом случае идёт в запас устойчивости саморегуляции народного хозяйства на основе схемы предиктор-корректор общественно-экономического развития.
Всякий аппарат средств описаний, включая линейную алгебру и прочую математику, всегда должен быть изпользован так, чтобы неизбежная ошибка описания, моделирования с его изпользованием и т.п. ушла в наращивание запаса устойчивости, безопасности решения, принятого на основе изпользования избранного описательного аппарата. В подавляющем большинстве прикладных задач интерпретации математического аппарата, удовлетворяющие этому требованию, удается построить тем, кто описывает реальность средствами математики, а не извращённо подгоняет жизнь под математический аппарат и математически безупречное само по себе решение.
[1] Так должно быть, поскольку нормально психика и личность человека формируется, если перед глазами ребенка протекает в ладу жизнь семьи нескольких поколений и он видит все возрасты предстоящей ему жизни.
[2] Это соотношение дало одно из названий балансового метода, общепринятое на Западе: метод «затраты — выпуск».
[3] За прошедшее после 1983 г. время была высказана версия, что СССР к уничтожению этого пассажирского лайнера не имеет никакого отношения. В книге Мишеля Брюна “Сахалинский инцидент” обосновывается мнение, что в то время США предприняли вторжение нескольких разведывательных самолётов в воздушное пространство СССР над Камчаткой, Курилами и Сахалином. В этих районах и над сушей, и над прилегающими водами (включая нейтральные) шли настоящие воздушные бои, в ходе которых было сбито несколько американских истребителей. Именно их характерные обломки были продемонстрированы под видом обломков Боинга-747, в конструкции которого им просто не было места. А Боинг-747, выполнявший рейс KAL‑007, маршрут которого пролегал через зону воздушных боёв, по ошибке (либо заметая следы провокации) сбили сами же американцы или японцы. В книге высказано недоумение, по каким причинам СССР и впоследствии Россия хранит молчание об истинных событиях начала сентября 1983 г., поддерживая официальную американскую версию.
С сокращённым переводом на русский язык книги М.Брюна “Сахалинский инцидент” можно ознакомиться в интернете по адресу: http://www.airforce.ru/history/kal007/ . (Сноска 2004 г.).
[4] Сбитого крейсером ВМС США сдуру или со страха над нейтральными водами за тысячи миль от территории образцово-показательной “демократии” вскоре после взлета с территории Ирана. Полезно обратить внимание, что командир крейсера под суд не пошел, а международная общественность давно забыла об этом акте терроризма со стороны США, хотя всё это время США многократно обвиняют Иран в международном терроризме.
[5] Начало и конец описания метода динамического программирования отмечены абзацами, состоящими из звездочек. Изложение метода носит самостоятельный характер и приложимо к управлению любыми житейскими ситуациями, тем не менее, желающие могут его пропустить. Те же, кто, ознакомившись с ним, посчитают никчемным его изпользование в управлении житейскими обстоятельствами в повседневности — ошибаются: просто не надо его сводить до дурости, подразумевая, что обычный выход из дома на работу должен сопровождаться предварительными расчётами в столбик или на компьютере. В методе есть общежизненная суть, которая не сводится к формам прикладной арифметики.
[6] Даваемая Богом непосредственно каждому способность разделить в своём возприятии мир на две категории «это» — «не это», на основе чего строится осмысленная индивидом картина мира, в котором он живёт. По существу в Различении человеку в двоичном коде «это» — «не это» даётся Свыше новая жизненно важная для него информация. Лишение Различения обращает индивида в заезженную человекообразную граммпластинку.
[7] Хотя в каноническом виде метода — критерий-максимум, однако это значения не имеет, поскольку в практике переход к канонической форме задачи достигается умножением на минус единицу соответствующих значений и выражений.
[8] «Ин-дивид». Одно из значений этого латинского слова — неделимый, хотя в русском языке оно обычно употребляется в ином значении, близком по смыслу к «своеобразный».